Usability
12 Years a Bug Friday, January 12, 2018
Shipping software sucks.
It's not that we don't want to put the software in the hands of our users. And it's not that we're not proud of the work. We do, and we are.
What sucks is that you always ship with bugs. Always. Some of them you know about. Some of them you don't.
Anyone who does this for a living knows how this works. You keep track of everything you find in the software. Some things are reproducible. Some things aren't. You draw up general approaches for investigation for the latter, and propose fixes for the former.
You then prioritize things, hash out a schedule, and decide what's worth fixing and what you can, in the end, live with...for now.
"We need to fix this post 2.0"
During the run-up to SuperDuper v3.1.2 (available today, see below), we were dealing with this whole investigate-prioritize-allocate-test cycle, when someone brought a sheet to our attention that's been a known low-priority thing for years.
12 years, to be precise.
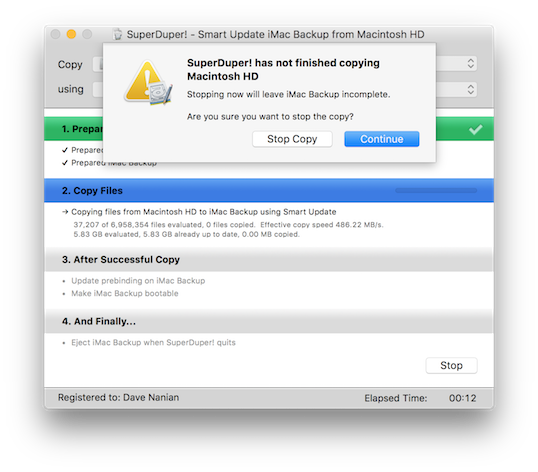
It's the basic "Stop the copy in progress" sheet that comes up when you want to stop a copy. It's something you can do by accident, and throw away a lot of progress, so we show a sheet that asks you whether you really want to stop.
Sensible, as far as it goes. But during the development of 2.0, there were a lot of potential cases that would have to be dealt with during a cancel, and while we were working through them, and how to present them to the user, a temporary cancel sheet was put in place.
A sheet that was immediately logged as "this has to be fixed" in our tracking database, because it was poorly worded, confusing and (please don't hurt us) had "Yes/No" buttons at the bottom. Enjoy this example of our overwhelming UI genius:
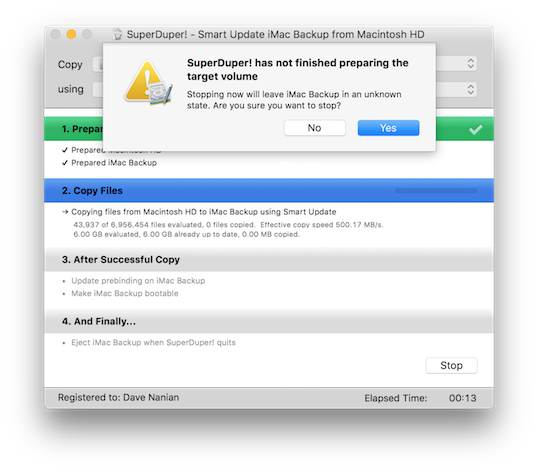
So many problems with that sheet. It's wrong, it uses crazy terminology, it doesn't match the rest of the app, it uses Yes/No buttons. I don't even...
There was a lot to do for v2.0, and development proceeded, other tasks took precedence, this sheet isn't used very much, and eventually we shipped 2.0 with the sheet in place, with the bug tagged as low-priority, known-terrible, embarrassingly bad, "we need to fix this post 2.0".
That cycle repeated over and over. It was an easy fix, but other things took precedence. This stuff happens. Shipping software sucks.
Well, it was terrible, and it's now 12 years post 2.0. So for the new year? Start celebrating, because it was fixed.
More Fixes!
This version also fixes a bunch of other relatively minor things that should please one or more of you:
- On some systems, the default settings didn't save if you had available snapshots and then went into Options, changed something, and exited.
- If your drive had a "#" in its name, an erase-then-copy backup would generate an error.
- Renaming a drive wasn't always reflected properly in the UI.
- Sometimes the Stop button would beep and not stop
- In some regions, snapshot date parsing could cause a crash at startup or drive selection
General cleanup, nothing too exciting, but a fix is a fix, and now they're available to you. Download away!
Download SuperDuper! v3.1.2
Snapshot Surprise! Friday, December 08, 2017
We've got something under the tree for all of you, and you get to open your present early.
Executive Summary
SuperDuper! 3.1 is out, and now allows Time Machine-like restoration from bootable APFS copies.
Wait, What?!?!
Oh, decided to join us for the details? Welcome to an ocean of words: prepare to get your feet wet!
Well, I told you there would be more surprises in store, and, so, here we are. Since the release of 3.0, we've not only been copying from a snapshot when using an APFS source. In addition, as some of you have noticed, we've also been creating snapshots on the backup.
This is why.
Turn Back the Clock
In SuperDuper! v3.1, you may notice a small change to the Copy Now button: a little up-triangle glyph. If you've selected an APFS volume as your source, you can click that triangle, and up pops a list of the snapshots available to copy from.
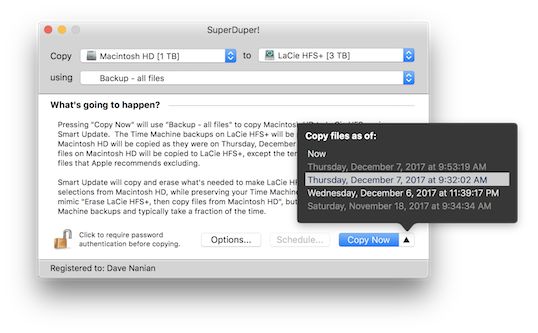
This means you don't just have to copy from the drive as it is "now" (the default choice). You can select from any existing snapshot, and we'll copy the state of the files as they were at that time.
But why would you want to do that?
Well, in High Sierra, the system takes a snapshot of your drive before it installs a software update. Having a problem with an update and want to check if it was different before, but forgot to back up first? No problem: use SuperDuper! to copy from the snapshot taken just before the update was installed, start up from the copy, and check the behavior.
Even better, if you're backing up to an APFS volume as we encourage, this works on a bootable copy, too! Since v3.0, we've been taking a snapshot of the backup volume before every copy we make. That means there's not just one available backup on the drive—if you've been using Smart Update, there are many! Start up from your backup drive, click the triangle, and you'll be presented with a list of available snapshots. Pick one, "Copy Now", and you've restored a day ago's backup, or a week ago's.
But Wait—There's More!
In fact, not only can you use SuperDuper to copy from these snapshots, you can even open Time Machine, select your backup volume, and see older versions of files, deleted files - they're all being saved, automatically, every time you Smart Update. Even though you're not backing up your backup to Time Machine. Because that would be silly.
This new feature is not intended to replace or replicate what Time Machine does. Snapshots are managed by the system, and at present they have some lightly-to-not documented constraints. You need to have about 20% free in a container to create a snapshot, and the system consolidates and removes snapshots according to its own logic.
As I've said before, an effective backup strategy should have multiple parts: SuperDuper!, Time Machine and an online service. The more (and more varied) backups you have, the safer you are. This new feature gives SuperDuper!'s bootable backups some cool new capabilities and an additional measure of protection should you make a mistake.
Now How Much Would You Pay?
Pretty awesome, right?
Needless to say, this is the kind of feature we love to introduce. It's completely transparent to the user, and is built on the extensive work we did to support APFS in v3.0. That support wasn't done at a surface level: we worked hard to research and make use of the more advanced features, like snapshots, and planned for the future in ways that truly make the backup experience better for everyone.
Including you. Update away!
Download SuperDuper! v3.1
Bad Craziness, Good Release! Wednesday, November 08, 2017
The short version
Blah-blah-blah what-the-heck-are-you-talking-about-Dave so many words oh, 3.0 is released? Got it.
The wordy-but-interesting version
Sometimes, on macOS, you run into behavior that really makes you go "huh".
An example: as you likely know, you can create a disk image with Disk Utility and format it as APFS. Which works fine.
And, if you've been reading the blog, you probably also know that APFS volumes reside in a container, which itself resides on a GUID partitioned drive. So, multiple layers: drive, partition, container, volume. You can see all those in Disk Utility.
But once you create the image, what you see in Finder is simpler: a single ejectable volume, with the name you gave it. So, you can open it, copy to it, eject it, and there you go.
Great, right?
Not so much
Ah, but programmatically, things are different.
If an application opens an image the old way, and then unmounts its volume using diskutil, umount or hdiutil, it doesn't do what it used to do.
You can easily see this in Disk Utility, too. After you create the image, try selecting the volume and clicking the eject button. When you do that, you'll see that while the volume ejected, the image is still sticking around in the sidebar. And if the image is hosted on an ejectable drive or network volume, and you then try to eject the host volume, you'll find the it can't be ejected.
Worse, if you force eject the host at this point (hey, folks—don't force eject!), you can damage the image.
Not good.
Huh.
Worlds within worlds
So, what's going on is that there are still two things "attached" from the image: the container and the partition. They don't get "released" after all the volumes are ejected for some inexplicable reason. And so, any application that mounted and ejected images can no longer rely on the previous behavior.
Mischief, managed
Fortunately, this is another situation that SuperDuper! handles for you. If you back up to an image file, you don't need to know what I've just explained: we deal with the details, and eject all the "parts" of an APFS image without any manual intervention.
As you've heard many times from me: it just works.
So while you may not want to know why, or how all this is accomplished...isn't it comforting to know that someone's figured it out and has your back?
#Finally
With that last bit of explanation, I'm happy to say that we've reached the end of this particular voyage. SuperDuper! 3.0 (release 100!) is done, and you'll find the download in the normal places, as well as in the built-in updater, for both Beta and Regular users.
SuperDuper! 3.0 has, literally, many hundreds of changes under the hood to support APFS, High Sierra and all versions of macOS from 10.9 to the present.
SuperDuper! 3.0 is the first bootable backup application to support snapshot copying on APFS, which provides an incredible extra level of safety, security and accuracy when backing up. It's super cool, entirely supported (after all, it's what Time Machine uses...and it was first overall), and totally transparent to the user.
It doesn't stop there, of course. We're already in progress on the next version, and we've got some really great things planned.
Thanks to all of you who participated in the beta, because the final release couldn't have happened without you.
And to those of you who didn't participate in the Beta: you are going to love the final result.
Without further ado, download SuperDuper! 3.0
Enjoy!
The Beta 7 Spooktacular! Wednesday, November 01, 2017
Gee, do you think the original plan was to release this update on Halloween? Spoooooky!
Poof!
When “Erase, then copy” is selected, SuperDuper! has always endeavored to match the format of the source. That is, if the source is Mac OS Extended [HFS+] (Journaled), and the destination is Mac OS Extended (Case Sensitive), on an erase, the destination would end up matching the source, adding Journaling and removing Case Sensitivity.
As I mentioned in one of my first High Sierra posts, we always knew this wouldn’t work when going HFS+ to APFS: you just can’t format an APFS container as HFS+ safely, since it can affect more than just the one volume.
We’ve discovered during our broader Beta rollout that, due to weird bugs in Disk Utility, formatting an HFS+ drive as APFS is unreliable too. Sometimes the drive just “vanishes” and doesn’t re-mount. Sometimes it fails for no reason. Sometimes it makes the one volume unreadable until it’s erased again.
It’s kind of scary crazy. But that seems to be par for the early version High Sierra course. It’s relatively solid in the main, but really weak at the margins.
...But I Don’t Do That
So, we’ve made a change in our “magic” behavior to deal with these issues. Basically, we continue to do what we’ve always done. But if the “major” part of the file system doesn’t match (that is, HFS+ and APFS), we just maintain the existing format of the drive.
So, if you copy APFS to an HFS+ volume with erase, we’ll erase the destination but leave it as HFS+.
Hopefully we’ll be able to change this as macOS stabilizes further.
Enter the Void
I regret to say that we’ve fixed the “black flash” bug, so you’ll no longer have a moment to stare into the blackness as it stares back at you.
Perhaps that’s for the best.
Spaced
We didn't notice (but should have) that our various numbers were now proportionally spaced rather than monospaced since we built against a newer SDK with different targeting when we made the UI 64-bit.
Of course, someone—and you know who you are—noticed right away. Embarrassing, and fixed.
It’s Log, It’s Log!
One of the things we’ve done is improve our diagnostic logging, so when people send in a bug report, we get a better feeling for the state of the drives attached to the system, and the problems that might be going on with the system, should there be any.
We changed this a bit to only collect the extended log information when copies fail.
In earlier OS versions we would include a bit of the system log, so we could see what hardware was doing at the time of the copy. That stopped working in recent macOS release, so we've changed it to use log show.
The problem is, log show -last 1m, including a kernel predicate so it only returns low-level kernel logging, can be slow. Not only that, but due to bugs in the logging subsystem, it can incorrectly return much more than one minute of logging. We've seen it return almost a gigabyte of log data!
Even though we also limit the data to a short snippet at the end of all that text, we have to wait for it to be collected, and when the system grabs too much, it can take a while to retrieve and then discard the extra stuff.
The end result of all this is that we only do it when copies fail, and we put up a modal sheet while it's going on.
And Also, Too
Previously, when users sent in a report, we only included the log information when they reported an "Error during copy". We were a bit too clever for our own good there, since people didn’t always choose the right issue type, and then we’d have to ask for the report to be sent in again. We now always attach the log when using “Send to Shirt Pocket”.
These are small things, I know, but they'll help me help you more quickly and efficiently, should you ever need support.
I Can't Quit You, Baby
There are still some issues with quit that we're aware of...we're working on them.
Various and Sundry
There has also been a bunch of polishing and fixing things at the margins, thanks to user reports from highly unusual configurations, but as before, things are working really well on the vast majority of systems, which we’re really happy about. It’s just kind of boring to write about how great things are working for most people!
So you get the point. And now you get the results. Download away!
Download SuperDuper! 3.0 B7
Workaround Turtle Wednesday, October 25, 2017
Any program of sufficient complexity ends up having to work around behaviors that are undesirable. That might be a usability issue caused by default framework behavior, due to the interaction model selected by the designer. Or it might be an OS issue that only shows up in some situations (the recent iOS calculator bug is a good example of that).
Most, though, don't have to deal with the huge variation of hardware, software, OS, etc that a program like SuperDuper! has to handle.
The vast majority of the beta cycle has been focused on getting coverage of as many systems as possible. With a broad range of different setups and configurations, we can then find issues in the way macOS 10.13 is dealing with those configurations, and try come up with workarounds so, when when we release the GA version of SuperDuper! 3.0, the broader user community will have a smooth experience.
A lot of these changes have been focused on attached volumes, incorrect state information being returned by macOS calls or tools in some configurations and states, and coming up with ways to prod and probe until macOS returns the correct data.
It can be challenging to do, since you don't want to break "working" setups, and any workarounds should only come into effect in situations where they're needed. That way, when the OS problems are fixed, everything continues to operate.
All of that is a longwinded way of saying, we're happy to release Beta 6 of SuperDuper! 3.0, which has even more workarounds for macOS issues, covering a broad variety of situations we've seen in the past week or so. (It's workarounds all the way down!)
The new beta should work better on every system, and it fixes a problem with the beta autoupdate mechanism as well...so the next release's autoupdate should work better.
Download away, and thanks!
Click to download SuperDuper! 3.0 B6
Fraternal Twins Monday, October 23, 2017
(I really wanted to embed the teaser trailer for Peter Greenaway's A Zed and Two Noughts above, but alas it's a tad NSFW. Really great movie, though.)
Content warning: some strong language is used in this post. Not without reason.
So, here's something that you might not expect me to say:
Because of the way APFS "file clones" work, no program operating at the file level, including SuperDuper!, can make an exact physical copy of every possible APFS volume.
That's right. There are cases where we can't make an exact copy of your APFS volume. And Time Machine can't either. Nothing can.
That doesn't mean the copy is bad! It just means it might not be as space efficient as the original.
Doomed! Doomed! (Well, maybe not so doomed.)
Remember back in this post where I talked about the demo where Craig showed how fast it was to copy a gigantic amount of data?
I explained back then it was because the files aren't being copied. Rather, APFS creates new directory entries for the files, but references the same data blocks. So nothing is copied, which is fast. This is documented in Apple's APFS Guide.
From the user's perspective, these are different files. They're not like hard linked files, where changing one copy changes the others (not that most users know what hard links are). As far as users are concerned, they're totally separate, even if, at the file system level, they share the same data.
In APFS, if one of the cloned files is changed, even by a single byte, that changed data 'splits off' from the rest, and the files are now physically, and not just logically, separate—some of the data blocks now have two copies: the original ones, and the modified ones.
This process continues as the files diverge further.
The amount of logical drive space taken by the copies is twice the original, of course. However, the amount of actual space taken is, effectively zero...until the files are changed. At which point the space taken is the original plus the number of modified blocks.
This is all handled for you by APFS. You don't really have to think about it.
Quantum Theory?
Until you do have to think about it.
Consider this case: you have a 1TB APFS drive, and three 333GB files, named A, B, and C. So the drive is nearly full.
You then create a folder, and copy the three files into that folder with Finder. Of course, you'd expect the copy to fail and the drive to fill...but it doesn't.
In fact, if you look at the volume's size with Get Info, you may be surprised to see it has the same amount of data on it as was there before you made the copies. But, if you look at Finder's size for the folder, you'll see you now have 2TB of data on a 1TB drive. It's like magic!
At least until you change one of the files.
But now, select those files and folders with Finder and try to copy them to another 1TB drive. What happens?
The drive fills.
A Shitty Analogy
You can't copy it to the same size drive! But why?
The reason is there's no (public) way to find out that two files are actually sharing the same data (they might even only be sharing some of the same data, as I explain above). So, when copied, the "clone" relationship is broken, as is the ten-pounds-of-shit-in-a-five-pound-bag magic. You now have a full ten pounds. It doesn't fit...so you end up covered in shit.
But What If You...
Yes, we know:
What if you kept track of checksums of every file on the drive, and then made "clones" for each file based on whether the files had the same data?
Leaving aside how ungodly slow that would be (think about trying to match ten million files to each other via checksums every time you copied), remember that cloning operates at a block level, where some blocks may be shared and some may not be. At a file level, it just won't work.
How about using hard links?
That won't work either: clones and hard links are not semantically equivalent at all, since changing one of the hard linked files would change all of them, by definition.
Just ask the file system!
While there are APIs to create clones, there's nothing there to find out whether two files are clones... and also, the shared data is at the block level, so still, no.
Time Machine does it!
Well, not really. Time Machine does seem to be able to determine if two files are clones (which I assume it's doing with private APIs, because I can't find any documented APIs to determine if two files are clones). When it backs up cloned files, it uses hard links to represent them (since HFS+ doesn't support clones, and Time Machine can only back up to HFS+ volumes), and when it restores, it checks to see if those files are clones (which it tracks in a special database), and restores them as clones to APFS...unless they're restored to an HFS+ volume, where all bets are off.
But even in the best case, restoring to APFS, when files get 'separated' when they're changed, again, only the part of the file that was changed is separate. The other blocks are still shared. So even though they've jumped through hoops to maintain the clone relationship, there are lots of cases where Time Machine's own copies will increase in size too, and it happens more and more as the files diverge further.
You guys are so smart, you figure it out! Why are you asking me?
Geez, don't get so defensive!
We're All in this Together
So, as you can see, given the low-level behavior, there's really no solution, even when you're Apple.
What does this mean for you? It means you can get in cases where data that fits on a source drive won't fit on a destination, even when the drives are exactly the same size.
To avoid problems, you need enough space to store the full logical size of the data (that is, with all the "clones" separated) when you copy, unless you're copying the entire container at a sector level.
We Good?
Again, this doesn't mean your backup isn't good! It is! It has all your data!
What it does mean is that the data isn't stored as efficiently on the backup. So, it might not fit on your drive when you back it up. And it also might not fit when you restore, if the backup ends up larger than the capacity of the source.
That's easy to check, and the solution is also pretty easy: have plenty of free space on your drives, folks. It's always been good advice, and given all this hidden behavior that happens with cloned files, it's even more important with APFS.
OK, back to the code mines...
Automatic Transmission Sunday, October 22, 2017
Good news: we've set things up on our update server so that the Beta version will now automatically tell you when there's a new beta ready, using our regular update mechanism.
Here's how it works:
- You "opt-in" to the Beta by installing one of the beta releases from the blog.
- The update server knows what versions are Beta versions. When you check for updates, and if you're running a Beta, it returns the current Beta, rather than the current production release.
- At the end of the Beta, we set the final "Beta Update" to the production release as shipped. Everyone with the Beta automatically updates to the production version, and future updates are normal, production updates.
- If you want to participate in a future Beta, you can do so by downloading and installing a Beta version, and the process repeats.
Hopefully this will make it easier for everyone to keep up with the current Beta releases.
Don't forget, though: if you're running schedules, you won't notice the updates unless you launch SuperDuper! manually... so, if you want to be sure, check for updates manually.
Thanks to all the testers—we really do appreciate your help.
Forward Into the Past! Tuesday, October 17, 2017
Executive Summary
Beta 5 is linked at the bottom of the post: we now copy Recovery volumes from both HFS+ and APFS sources to APFS, and "stash" recovery on HFS+ destinations for restoration to APFS if needed.
Details, Details!
Before the advent of APFS, volumes were rigid elements created by physically partitioning a drive, logically erecting barriers between fixed areas of storage. While in later versions of macOS those barriers could sometimes be moved by the command-line diskutil, that functionality was not exposed in the GUI Disk Utility until relatively recently, and was prone to failure.
Even then, adding, resizing and removing partitions was more convenient and accessible...but relatively fragile. Reliable, extensive partitioning (with a friendly interface) was only available in 3rd party tools like iPartition, because it was able to physically relocate data blocks, change partition schemes, etc. The inherent rigidity of the layout of HFS+, even after the introduction of the intermediate-layer CoreStorage setup, got in the way of reliable volume creation and resizing, making the process risky.
Casiotone Nation
The design of APFS changes and improves all of that. Volumes inside an APFS container aren’t defined by rigid barriers, and their storage doesn’t have to be contiguous. All of the volumes in a given APFS container are extremely flexible and share a common free storage pool managed by the container itself. Creating and deleting partitions is a simple and safe operation. There's no need to create images to try to maximize storage efficiency on a drive, or to store three backups on a given drive: you just add new partitions, and they do what you'd expect. Failure is quite rare and for typically obvious reasons.
The Past is Prologue
When Apple got rid of CDs and switched to Recovery it was, in many ways, a step back. Reliable, immediately accessible, archivable media was replaced by a hidden volume on a drive that could fail. Even though Internet Recovery, an EFI-based failsafe, provided a backstop, it took a long time (and required internet access) when things went really wrong.
Save for bootable encrypted volumes, though, the Recovery volume was a nice thing to have on a backup volume, but not a necessary one. While it wasn’t terribly challenging to copy a Recovery volume, creating the partition for it, given diskutil’s capabilities, was risky. And its contents were also undocumented, even if relatively consistent from release to release.
Given Apple could recreate the Recovery volume during a macOS reinstall (a time consuming but easy operation that put a fresh OS under existing applications and data), and the fact that it wasn't needed for startup or restore, we decided to take a more conservative, safer approach and not copy Recovery.
Not because we couldn’t. But because we didn’t think we should, given the risks involved.
#It Gets Better
The introduction of APFS allowed us to revisit that decision. Because its more flexible volume creation is low-impact, the risks inherent in adding and managing the Recovery volume itself are minimal. Recovery now has its own special, documented “Role” within the APFS container, and its contents follow the pattern established for Preboot. Even encryption is done differently: it's properly managed in Preboot, which can be created and updated by a documented system tool, provided by Apple, further ensuring proper operation and compatibility as Apple makes changes and modifies requirements.
After carefully evaluating the new support and determining there were minimal risks, we decided that we could safely copy and manage Recovery for APFS containers, whether copied from APFS or HFS+ sources. And so we do.
That means we still don't create a Recovery volume on an HFS+ volume for the reasons above...but we can copy from an HFS+ volume to an APFS volume and properly copy its recovery to APFS (since that's as safe as APFS to APFS).
If you're copying HFS+ or APFS to an HFS+ device, we still work when restoring to APFS: we automatically create a Recovery “stash” on an HFS+ volume, and can restore it to APFS when necessary.
Your Well-Earned Reward
While the details above are a bit complicated, the best part is that, as with most other aspects of SuperDuper!, there’s nothing you need to do. The details are handled for you. It just works.
In the end, that’s our goal, and our slogan: Heroic System Recovery for Mere Mortals. We hope you agree.
SuperDuper! 3.0 B5.1
Postscript
The above is the 2nd post of Beta 5 (I called it Beta 5.1 but the version is the same). The first Beta 5 had a bug in it that caused temporary folder cleanup to fail.
This got through regression because we had tested against a number of bootable volume cases without checking the startup volume on the High Sierra test system itself (as opposed to the thumdrives, etc, that we've got for the various disk cases we handle). We tend not to run that every time because the variations (Erase, Smart Update, etc) take much longer with a huge drive. Alas, the startup volume is a different case...and we missed it.
Needless to say, that case is now checked even though it's slow (vs only during "dogfood" daily-build backup runs).
Ah, public betas This kind of stuff is OK when it's all internal. Sorry about that!
November has rolled around, and that means it's been a month or so since SuperDuper! was released for El Capitan. Rather than go through a litany of how awesome we are (I hope that's obvious), I thought I'd take a moment to discuss the things we've screwed up, bugs we've found, and other embarrassments. Prepare to judge us...harshly!
Update, schmupdate
First, as anticipated in previous blog posts, the broken automatic update (with an error at the end of the process, triggered by a last-minute change in System Integrity Protection, causing the update to fail) has been a never-ending series of hassles for our users (and a pretty unbelievable number of support requests).
Despite releasing the new version well before El Capitan came out, it's clear that people didn't update until they actually installed 10.11, and at that point the update failed.
Much of this is our fault. The update itself isn't displayed until the application launches, and a scheduled copy continues past the notice and completes the tasks at hand, then quits. That means that most users never even see SuperDuper! doing its thing, and thus never even know the update is available. So, by trying to be as "magic" and "unobtrusive" as possible, we end up hiding important information.
In most cases, this doesn't matter, since an update that is put out to work around a problem will be presented when a failure occurs. But in this case, it caused unnecessary stress, not to mention painful RSI flareups. (Not really, but man, I've been typing a lot on the new Magical Mystery Keyboard.)
Anyway, in the next major update we're definitely going to rework how this stuff happens. ("It's about time" shout the displeased and annoyed masses.)
Schedule screwup
This one's totally on me. I documented the problem with Apple's removal of /usr/bin/lockfile in this blog, but I forgot to add the fact that you have to delete and recreate your schedules to the update notice and release notes.
Not everyone on the 'net reads this blog. Who knew? (Me. Duh.)
Documenting Apple's Changes
El Capitan removed the ability for 3rd party applications to do certain things, and while we handle those cases well, I didn't actually document the changes in the release notes:
1. Repair Permissions is no longer an option (Apple removed it completely at the user/app level; it's been less than useful for many years now, so—as I indicated below—no big loss).
1. Non-Apple applications can no longer programmatically set the startup drive, so we can't offer that as an "On successful completion" option.
1. And, due to the above, the option to restart from the backup drive has also been disabled.
Save for some users' old habit of reflexively repairing permissions (we've always shipped with that option OFF), these are all used relatively rarely, so their loss is not keenly felt. Still, should have been in the release notes.
The Curious Case of the Tiny Pipe
Here's where I get a bit technical, so feel free to skip this section if you don't want the boring-ish details.
SuperDuper! is broken into a number of primary processes: a UI, an escalated privilege Agent, and the Copy Engine. (There are others, like the various parts of the scheduler, but those are the primary ones.)
Those processes communicate through Unix Pipes: basically, streams that run between two processes and allow commands to be issued and results returned. One process writes a task to the command pipe connected to the process it wants to control, and then reads the result from the result pipe.
This is how we've done things since the very first version of SuperDuper (and was, at the time, the Apple-sanctioned way of doing this kind of thing).
Works great, very Unix.
Weirdly, in El Capitan, we had a few users report that some commands—commands that are entirely static in our application, and issued to the shell—returned syntax errors. It didn't happen often, and we never saw it here, but when it did, the only thing that resolved the issue was restarting the Mac.
That's an annoying kind of problem, as you might guess.
We put together an instrumented series of builds for a user who was kind enough to run them (over and over and over), and determined that:
- When in this state, the pipe was only passing through 512 bytes of the write. Powers of two: always suspicious.
- No errors were returned from any of the write commands.
- No exceptions were thrown.
- The pipe wasn't buffered (or, we couldn't switch it to unbuffered if it was).
- Attempts to try to flush the pipe didn't work.
- Adding CRs (in case the pipe was somehow line-buffered) didn't do anything
- You get the idea. (Again, thanks to the kind soul who ran this stuff over and over as we tried things out.)
So, we had a pipe with a weird size, that wasn't returning errors, but also wasn't passing through the data we were writing to it, once it was over 512 bytes.
Reviewing the POSIX documentation on pipes, they're usually pretty big (as in 64K), but the guaranteed size is only 512 bytes.
A number that might be spookily familiar. (Yes, I wrote this post on Halloween. Why do you ask?)
It seems that, on some systems, the size of a pipe write can shrink much smaller than in previous versions of the OS, perhaps because of resource constraints (although our test system that was always failing was a new Mac Pro with tons of resources)...as small, as far as we can tell, as the guaranteed minimum of 512 bytes. So, when our commands got larger than that, things started to fail on some systems, sometimes.
Still quite annoying. And even with that, we'd expect an error to be returned or thrown when writing to the pipe, but that didn't happen...and seems to be a new bug in El Capitan. Very hard to report, because we don't have a reproduction case: we've never seen it happen in house, on any system. But at least we had a way to work around the problem.
We now chunk our writes to whatever dynamic minimum we find we need. In testing, that allowed the data to pass through the pipe even when smaller than normal, and the syntax error (caused by the truncated data) went away.
Problem, hopefully, solved!
Not that bad
As new-release problems go, those are all annoying, but not too bad. Of course, we hate having any issues at all, but better minor than major! Please take that into consideration as you go into deliberations.
And the new release with better release notes and the pipe fix? A beta version is now available to you here!
Enjoy and, as always, thanks for being a SuperDuper! user.
Public betas mean more storytelling on the blog. I feel a bit like we're developing in public—something I don't really like doing—but I hope it's interesting to those of you reading the blog and testing both El Capitan and these public SuperDuper releases.
One at a time, please
Ever since Ye Olden Days of OS X, there's been a handy Unix command called "lockfile"—in /usr/bin—that creates semaphores. It's quite handy in scripts of various sorts to ensure that "critical" sections are only executed by one script at a time, if more than one instance of that script might be running simultaneously. Scripts could be anything with shell access: shell scripts, perl scripts, AppleScripts...whatever.
We've used this for a long time in SuperDuper's schedule driver (which has always been written in AppleScript as an example of how to use SuperDuper!'s handy scripting interface); since you could have any number of schedules running at any given time, there are some operations that need to be atomic, and lockfile facilitated that. Basically, all the instances of the schedule scripts coöperate (you're welcome, New Yorker style guide, I hope your writers no longer feel so alone) using a semaphore that ensures only one runs at a time.
And all was great in the world.
Meep meep
Little did we know that there was a shoe—or an ACME-branded anvil—preparing to drop (although perhaps the fact that it was in /usr/bin was a hint): in El Capitan B4, Apple decided to stop shipping Procmail, and with it, lockfile. It wasn't deprecated and then removed... it was unceremoniously sent to the bit bucket. So, as of B4, scheduling in El Capitan broke.
There isn't any equivalent command in OS X that we could find, but there were a number of methods we could have used to fix this:
- Use a complicated shell script, along with the seemingly-atomic mkdir command, to create and manage our own semaphore, using similar semantics
- Add a command to our AppleScript dictionary to implement a semaphore
- Add some commands to another utility program we have to implement semaphores
- Create our own separate lockfile-equivalent utility
- Engage in a futile effort to get lockfile put back into OS X (not going to happen, of course, since the change was obviously intentional; indeed, our bug was closed "as intended")
- Crawl into a dark room and cry softly, hoping the problem resolves itself
There's no crying in OS X, mostly
In the end, we did none of those things. Instead, since Procmail is Open Source, we changed our build process to build lockfile as well, and included that command, unmodified, in our bundle.
Et Voilà!
This also meant we had to change the scripts that were looking for lockfile to find our application bundle and call the new, "local" version of lockfile instead. And that means, unfortunately, that users have to delete and recreate their schedules.
I hate it when that's necessary. Really. Not just because it means lots of additional tech support (people don't usually read the release notes). I hate it because it's a pain, even though it's not hard, and it means an update isn't as transparent as I want it to be. New versions of SuperDuper! should drop in, require no work, and present no surprises to the user, other than pleasant ones. Unfortunately, sometimes reality gets in the way.
The great reward
So without further ado, download Beta 3 - and don't forget to delete and recreate your schedules!
Page 2 of 4 pages < 1 2 3 4 >
